Vectores en el plano


- Detalles
- Categoría: 1º Bachillerato
- Publicado el Martes, 05 Febrero 2013 01:17
- Escrito por Mariano Herrero
Sabemos que una recta tiene infinitos puntos; si unimos dos puntos de esa recta obtenemos un segmento de la recta. Cuando estos puntos están dados en un cierto orden, se dice que el segmento está orientado.
Vector es un segmento orientado. El primero de los puntos que lo determinan se llama origen del vector y el segundo extremo.
Designaremos por ![]() a un vector fijo del plano que tiene su origen en el punto A y su extremo en B.
a un vector fijo del plano que tiene su origen en el punto A y su extremo en B.

Características de un vector:
- dirección: recta que contiene al segmento
- sentido: orientación del segmento: sentido de A a B o bien de B a A
- módulo: la longitud del segmento que le define.
Vector nulo es aquel que tiene por origen y por extremo el mismo punto: se representa por ![]() , tiene módulo 0 y carece de dirección y sentido.
, tiene módulo 0 y carece de dirección y sentido.
Vector unitario: Es un vector que tiene módulo 1
Dos vectores que están situados en rectas paralelas tiene la misma dirección.
Componentes de un vector respecto del sistema de coordenadas con origen O y ejes X, Y son las proyecciones del vector sobre los ejes.
Sea el punto A(x1, y1) y el punto B(x2, y2), las componentes del vector ![]() son dos números reales que se obtienen restando a las coordenadas del extremo las del origen; se escribe
son dos números reales que se obtienen restando a las coordenadas del extremo las del origen; se escribe ![]() = (x2 – x1, y2 – y1) = (a, b) donde a =x2 – x1 y b = y2 – y1
= (x2 – x1, y2 – y1) = (a, b) donde a =x2 – x1 y b = y2 – y1
Cálculo de las características de un vector. Sea el vector determinado por los puntos A(x1, y1) y B(x2, y2), ver figura 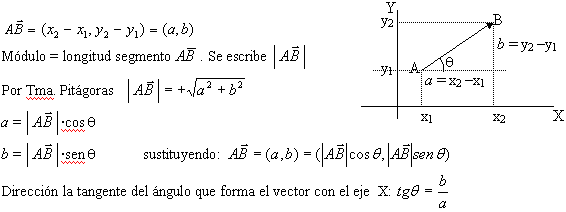
Sentido según signo de la tangente
Ejemplo: Sea el vector definido por los extremos del segmento A(3, 1) y B(-2, 4), halla sus características; es decir, dirección, sentido y módulo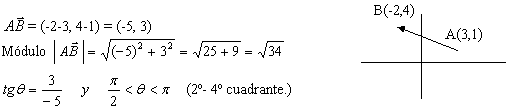
Dos vectores son equipolentes cuando tiene la misma dirección, mismo sentido y mismo módulo. Evidentemente si tiene la misma dirección, sentido y módulo, tiene iguales sus componentes y viceversa.
Vector libre:
Los vectores “pequeños” de la figura (2º - 4 º cuadrante) son 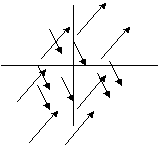 equipolentes, pues tienen el mismo módulo, dirección y sentido de componentes (a, b). El conjunto de todos los vectores fijos del plano de componentes (a, b) forman una clase de equipolencia
equipolentes, pues tienen el mismo módulo, dirección y sentido de componentes (a, b). El conjunto de todos los vectores fijos del plano de componentes (a, b) forman una clase de equipolencia
Con los vectores “grandes” de la figura (1º - 3 º cuadrante) sucede lo mismo; son equipolentes, pues tienen el mismo módulo, dirección y sentido de componentes (c, d). Forman otra clase equipolencia
Se llama vector libre a cada una de esas clases de equipolencia. Se designa por una letra minúscula ![]() , etc.; puede venir representado por uno cualquiera de los vectores fijos que lo forman
, etc.; puede venir representado por uno cualquiera de los vectores fijos que lo forman
Por tanto un vector libre está determinado cuando se conoce uno cualquiera de sus infinitos vectores fijos, o bien cuando se conocen sus componentes.
Si ![]() es un vector libre y
es un vector libre y ![]() su representante de origen O y extremo A, se dice que
su representante de origen O y extremo A, se dice que ![]() es el vector de posición del punto A, respecto del sistema de coordenadas del que O es su origen.
es el vector de posición del punto A, respecto del sistema de coordenadas del que O es su origen.
OPERACIONES CON VECTORES
Suma y diferencia de vectores libres, producto de un número real por un vector y
producto escalar de dos vectores que se estudian en otro tema,